🚧 Arduino-Based Automatic Toll Gate System
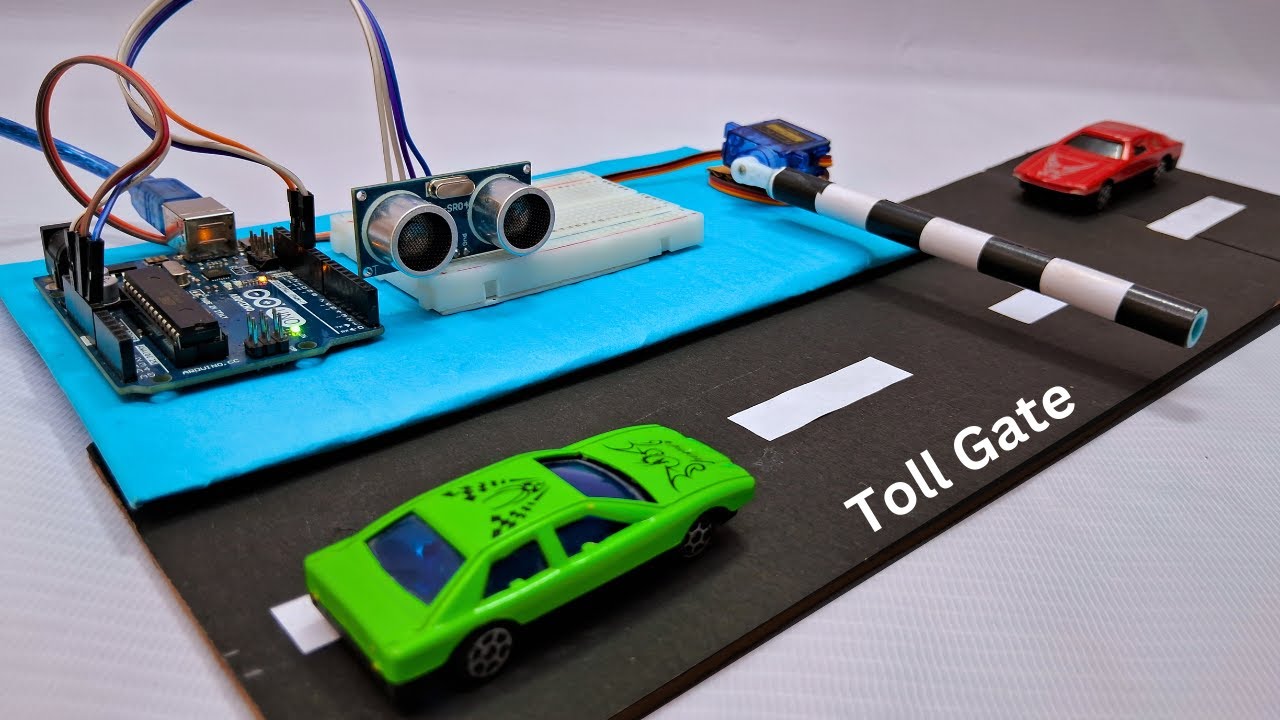
This project simulates a smart toll gate system built around an Arduino Uno, designed to automatically detect vehicles and control a barrier gate mechanism. The system uses an HC-SR04 ultrasonic sensor to measure the distance of an approaching vehicle. When a vehicle enters the predefined detection range, the Arduino processes the signal and commands a servo motor to rotate, lifting the toll barrier arm. After a delay (or once the vehicle passes), the gate closes automatically.
⚙️ Working Principle
- The ultrasonic sensor continuously emits sound pulses.
- When a vehicle enters its detection range, the reflected echo signal is measured.
- Arduino calculates the distance using time-of-flight principle.
- If the distance is below a set threshold, Arduino activates the servo motor.
- The barrier gate rotates upward (typically 90°).
- After a programmed delay, the servo returns to its original position, closing the gate.
🧩 Components Used
- Arduino Uno
- HC-SR04 Ultrasonic Sensor
- Servo Motor (SG90 or similar)
- Breadboard & Jumper Wires
- Toy vehicle (for demonstration)
- Power Supply
🚦 Key Features
- Automatic vehicle detection
- Contactless barrier operation
- Adjustable detection range
- Programmable open/close timing
- Expandable to RFID or smart payment integration
🧠 Technical Concepts Involved
- Embedded C Programming
- Distance Measurement using Ultrasonic Sensors
- PWM-based Servo Control
- Real-Time Decision Logic
- Basic Automation & Access Control Systems
💡 Real-World Relevance
- This is not just a classroom model — it mirrors how automated toll plazas, parking lots, gated communities, and industrial entry systems operate. With further upgrades like RFID, number plate recognition, or IoT logging, it can evolve into a full smart infrastructure prototype.
Category
Hardware + Software
Difficulty
Intermediate
Complete Project KitContact for more
INSTANT DOWNLOAD / DELIVERY
- ✓ Complete Source Code
- ✓ Project Report (Word/PDF)
- ✓ PPT Presentation
- ✓ Installation Support
STEP 01
Components Required
Gather all the components usedd in this project which are listed below 1.Arduino Uno/Nano 2.Rfid reader and card 3.Servo(SG90/MG90) 4.Buzzer 5.Led(Red+green) 6. Breadboard 7.Jumper wires 8.LCD 16x2 i2c
STEP 02
Circuit Diagram
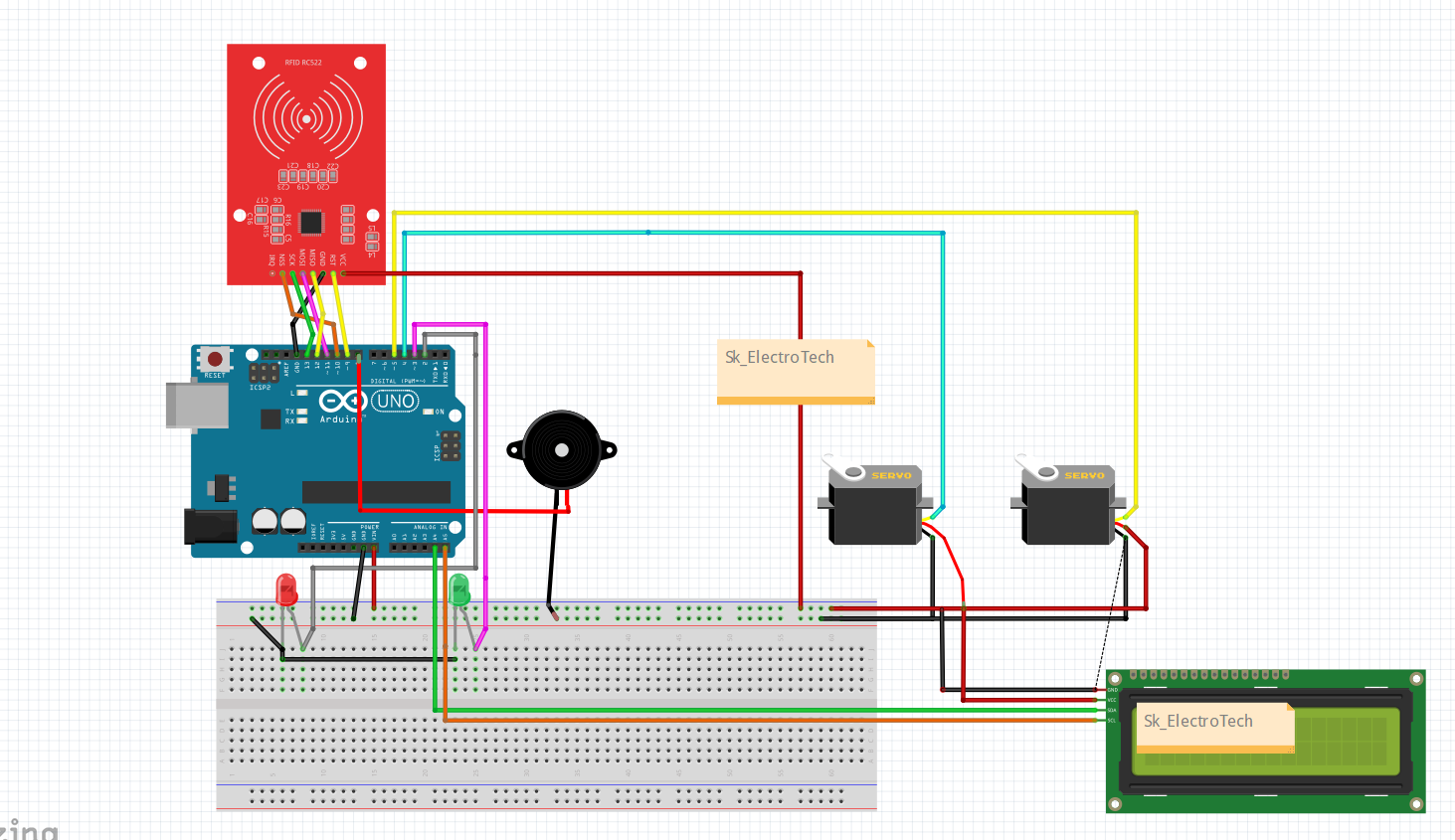
STEP 03
Arduino Ide Code
Arduino Code
/*
* 🚀 Metro Door Opening System using RFID & Servos
*
* 🔧 This project demonstrates an automatic metro door opening system
* controlled by RFID cards and servo motors. When an authorized
* card is scanned, the metro doors open, and upon an unauthorized
* attempt, an alert system (LED & buzzer) is activated.
*
* 🎯 Features:
* ✅ RFID-based access control for more updates kindly visit sk_electrotech on instagram
* ✅ Dual servo motors for door movement
* ✅ LED indication for access status
* ✅ Buzzer alert for unauthorized access
*
* 📌 Follow @sk_electrotech on Instagram for more project ideas! 🔥
* 💡 "Innovation distinguishes between a leader and a follower." – Steve Jobs
* 💡 "The best way to predict the future is to create it." – Peter Drucker
*/
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
#include <SPI.h>
#include <MFRC522.h>
#define SS_PIN 10
#define RST_PIN 9
#define SERVO_LEFT_PIN 4
#define SERVO_RIGHT_PIN 5
#define BUZZER_PIN 8
#define RED_LED_PIN 2
#define GREEN_LED_PIN 3
LiquidCrystal_I2C lcd(0x27, 16, 2); // I2C Address (0x27 or 0x3F depending on your LCD)
Servo leftServo;
Servo rightServo;
MFRC522 rfid(SS_PIN, RST_PIN);
byte authorizedUIDs[][4] = {
{0x33, 0x20, 0x42, 0xFB},
{0xA3, 0xDC, 0x54, 0xFB},
{0x19, 0x35, 0x57, 0x6D}
};
int authorizedCount = 0; // Counter for authorized scans
void setup() {
Serial.begin(9600);
SPI.begin();
rfid.PCD_Init();
lcd.init();
lcd.backlight();
displayMessage("Metro Door Ready", "Scan Card...");
leftServo.attach(SERVO_LEFT_PIN);
rightServo.attach(SERVO_RIGHT_PIN);
pinMode(BUZZER_PIN, OUTPUT);
pinMode(RED_LED_PIN, OUTPUT);
pinMode(GREEN_LED_PIN, OUTPUT);
leftServo.write(0);
rightServo.write(180);
digitalWrite(RED_LED_PIN, LOW);
digitalWrite(GREEN_LED_PIN, LOW);
digitalWrite(BUZZER_PIN, LOW);
}
// Function to display messages on LCD
void displayMessage(String line1, String line2) {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(line1);
lcd.setCursor(0, 1);
lcd.print(line2);
Serial.println(line1 + " | " + line2); // Print the same message on Serial Monitor
}
// Function to check if a scanned card is authorized
bool isAuthorized(byte *cardUID) {
for (int i = 0; i < 3; i++) {
bool match = true;
for (byte j = 0; j < 4; j++) {
if (cardUID[j] != authorizedUIDs[i][j]) {
match = false;
break;
}
}
if (match) return true;
}
return false;
}
void loop() {
if (!rfid.PICC_IsNewCardPresent() || !rfid.PICC_ReadCardSerial()) {
return;
}
Serial.print("🔹 Card UID: ");
String uidStr = "";
for (byte i = 0; i < rfid.uid.size; i++) {
Serial.print(rfid.uid.uidByte[i], HEX);
Serial.print(" ");
uidStr += String(rfid.uid.uidByte[i], HEX) + " ";
}
Serial.println();
displayMessage("Card Scanned:", uidStr); // Show UID on LCD
bool authorized = isAuthorized(rfid.uid.uidByte);
if (authorized) {
authorizedCount++; // Increment authorized scan count
Serial.println("✅ Access Granted - Opening Doors");
displayMessage("Access Granted", "Opening Doors...");
digitalWrite(GREEN_LED_PIN, HIGH);
digitalWrite(RED_LED_PIN, LOW);
digitalWrite(BUZZER_PIN, HIGH);
delay(200);
digitalWrite(BUZZER_PIN, LOW);
leftServo.write(90);
rightServo.write(90);
delay(3000);
Serial.println("🚪 Closing Doors...");
displayMessage("Doors Closing...", "Wait...");
leftServo.write(0);
rightServo.write(180);
digitalWrite(GREEN_LED_PIN, LOW);
} else {
Serial.println("❌ Access Denied");
displayMessage("Access Denied", "Try Again!");
digitalWrite(RED_LED_PIN, HIGH);
digitalWrite(GREEN_LED_PIN, LOW);
for (int i = 0; i < 5; i++) {
digitalWrite(BUZZER_PIN, HIGH);
digitalWrite(RED_LED_PIN, HIGH);
delay(100);
digitalWrite(BUZZER_PIN, LOW);
digitalWrite(RED_LED_PIN, LOW);
delay(100);
}
digitalWrite(RED_LED_PIN, LOW);
}
delay(1000);
String countMsg = "Total Card.: " + String(authorizedCount);
displayMessage("Scan Next Card", countMsg);
rfid.PICC_HaltA();
}